OpenRoss simplify data entry for Italian regional accommodation tracking systems like Ross1000. Streamline your workflow & save time with this free tool.
Abstract
OpenRoss is a project designed to facilitate the use of a system currently employed by several Italian regions for monitoring guest presence within hotels and holiday apartments. Addressing a specific operational bottleneck, this tool streamlines data transfer and reduces manual input requirements, ultimately saving valuable time for those responsible for compiling accommodation records.
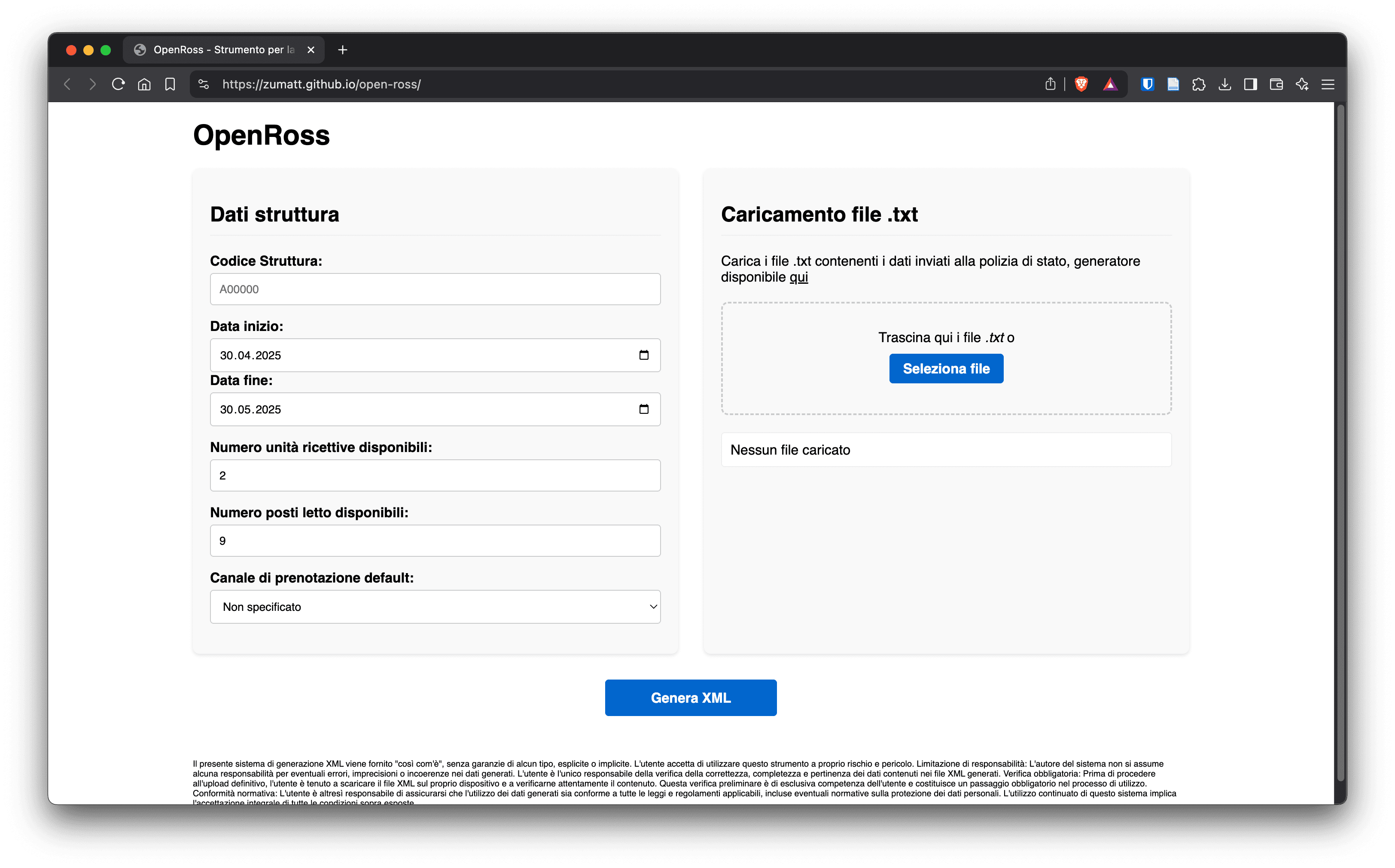 The OpenRoss software - Image courtesy of Matteo Subet under CC BY SA 4.0
The OpenRoss software - Image courtesy of Matteo Subet under CC BY SA 4.0
Concept
The existing system used for tracking accommodation details, essential for regional oversight and often shared with law enforcement agencies, necessitates manual data entry. While much of the required information is already generated through other platforms, this process can be repetitive and time-consuming. OpenRoss aims to bridge this gap by providing a means to quickly generate files compatible with Ross1000, a specific system used for regional accommodation tracking.
Process Development
The tool leverages data initially created via the online generator found at https://zumatt.github.io/generatore-schedine-alloggiati-web/. This existing resource allows users to compile guest information intended for police portals. OpenRoss then provides a streamlined pathway to transform this pre-existing data into a format suitable for direct import into Ross1000, thereby eliminating the need for complete manual re-entry. The project’s development focuses on efficiency and reducing redundant effort within the existing workflow.
Note
OpenRoss is intended as an aid for individuals already familiar with both the data generation process (via https://zumatt.github.io/generatore-schedine-alloggiati-web/) and the Ross1000 system. It does not provide instruction on either of these platforms.
How to cite this page:
Subet, Matteo (2025). OpenRoss. Retrieved on 18 December 2025 from zumat.ch/projects/openRoss.html